智能機器人焊接需要自動尋找到焊縫幾何特征,以便進行有效的智能控制。因此,系統的性能在很大程度上取決于焊縫發現階段的成功。基于視覺的智能機器人焊接研究是其中機器人應用增長最快的領域之一。但是,在很大程度上,機器人的示教策略焊接任務仍然是“示教和回放”。因此,完全自動化機器人焊接系統尚未有效實現。這是由于焊接環境條件惡劣以及焊接飛濺和電弧光干擾、焊接材料類型、焊接發熱引起的變形以及焊縫結構變化等各種因素造成的。
智能機器人焊接系統包括三個基本組件:1)跟蹤和分析焊縫;2)機器人軌跡規劃和控制;3)焊接過程的參數控制。機器人軌跡規劃和控制涉及機器人的示教以遵循焊縫路徑,在特定的焊炬方向,并且有效地執行所需的焊接任務。
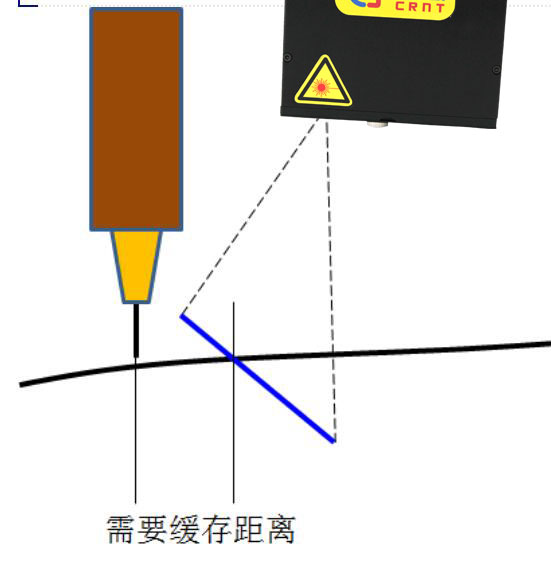
在各種焊縫尋位技術中,主動激光視覺是最有效的方法。它通常需要高質量的激光器、相機和光學濾波器。該算法的成功取決于對圖像處理和特征提取算法非常敏感。

主動激光視覺方法采用了順序圖像處理和特征提取算法,以便從沒有傳統窄帶濾波器捕獲的低質量激光圖像中有效地提取焊縫幾何特性。
主動激光視覺方法采用了一種新的激光分割和檢測方法。分割方法涉及平均,顏色處理和斑點分析等技術。該檢測方法基于新穎的中值濾波技術,中值濾波技術涉及基于圖像中的基礎結構和方向來增強圖像對象,增強了圖像中垂直取向的激光條紋,改善了激光峰值檢測。執行圖像處理步驟以確保在焊接區域(ROI)內準確地提取激光輪廓。采用了基于像素強度分布和鄰域搜索的特征提取算法,可以有效地提取焊縫特征點。